This section
lists frequently asked questions about V-STARS, and photogrammetry.
How accurate is V-STARS?
The short answer is V-STARS is very accurate and provides accuracies
comparable to those achieved by other large volume, high accuracy
coordinate measurement systems such as Digital Theodolites, Co-ordinate
Measuring Machines (CMMs), and Laser Trackers. Typical accuracies
are 20 to 40 microns (0.0008" to 0.0016") on a 3-meter (ten
foot) object.
The long answer is a bit more
complex since accuracy depends on several inter-related factors. The
most important are:
1. The resolution of the camera
you are using,
2. The size of the object you're measuring,
3. The number of photographs you're taking, and
4. The geometric layout of the camera stations (camera locations)
relative to the object and to each other.
The effect of each of these
factors is described briefly below.
Resolution
The resolution of the camera you're using is a major factor in determining
the overall accuracy of V-STARS. V-STARS is able to measure the centers
of images to better than 1/50th (0.020) of a pixel typically. For
a 2,000 by 2,000 pixel camera such as the KODAK Megaplus 4.2, this
represents an inherent accuracy of 1 part in 100,000 (2000/0.020).
Other factors mentioned above will increase or decrease this inherent
accuracy. Cameras with fewer pixels will have lower inherent accuracy.
Cameras with more pixels have a higher inherent accuracy.
Object Size
The absolute accuracy of V-STARS depends on the size of the object
being measured. Given the 1 part in 100,000 inherent accuracy mentioned
above means a measurement accuracy of 50 microns (0.002") will
be achieved on a 5 meter (15 foot) object (5 meters/100,000 = 50 microns),
100 microns (0.004") will be achieved on a ten meter (30 foot)
object (10 meters/100,000 = 100 microns), and so on.
One technique you can use to
increase accuracies is to move in closer, and photograph the object
in sub-sections. For example, a ten meter object can be measured to
an accuracy of 50 microns instead of 100 microns by photographing
the object in five meter sections. Of course this requires taking
more photographs (usually at least twice as many) since the typical
photograph sees only a fraction of the object. One can increase absolute
accuracies considerably by using this technique, but the measurement
becomes increasingly complex. One key to using this technique successfully
is to ensure there is enough overlap among all the photographs to
provide a good solution.
Number of Photographs
All other factors being equal, increasing the number of photographs
will increase the accuracy of the measurement. Since V-STARS measures
by triangulation, each target must be measured in at least two photographs
for the point to be triangulated. If a target is seen in more than
two photographs, the accuracy will increase. However, the accuracy
increase is not linear. As a rule of thumb, the accuracy increases
with the square root of the increase in the number of photographs.
So, to increase the accuracy of a two-photo measurement by a factor
of two, you must take not twice as many photographs but four time
as many, or eight in this case. To increase accuracy by another factor
of two, you would have to take 32 photographs. Obviously, one quickly
reaches a point of diminishing returns when simply taking more photographs
to increase accuracy.
That said, it is worth mentioning
that additional photographs also increase reliability because they
reduce the influence of poor measurements. For that reason, we recommend
trying to have each target seen in at least three (and preferably
four) photographs. These pictures should be taken from different stations.
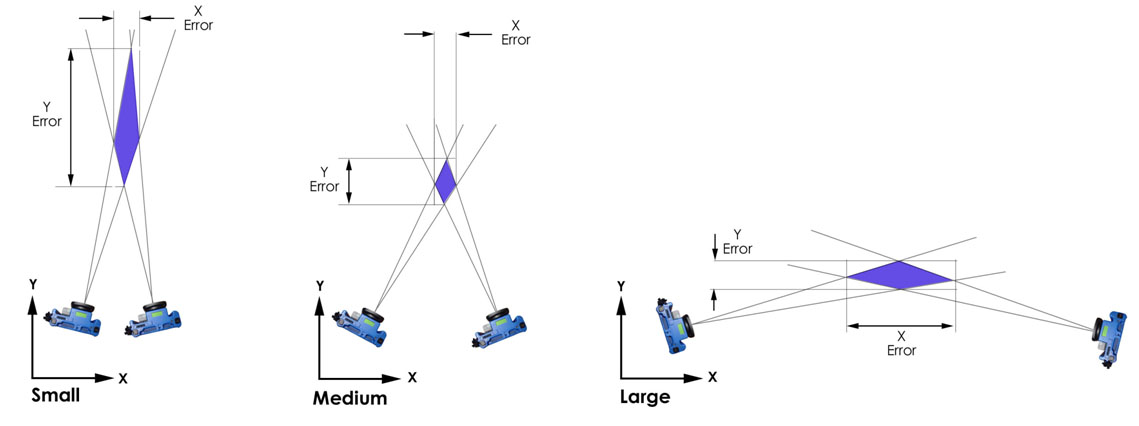
Geometry
Since V-STARS measures by triangulation, the geometry of the camera
stations can have a considerable influence on measurement accuracy.
Typically, one should try to get intersection angles of 90° or
so between the lines of sight of the camera stations for the best
results. Smaller intersection angles will progressively reduce accuracies.
The figure below illustrates this. The thin lines around the thick
lines show how errors in detecting the true centroid of target image
produce errors in determining the location of the target.
Final Discussion on
Accuracy
As you can see from the above discussion, accuracies can vary considerably.
However, if you use the INCA camera, and take six to eight photographs
with good geometry, and each photograph sees the entire object you
should obtain accuracies of 20 to 40 microns (0.0008" to 0.0016
") on a 15 foot object.
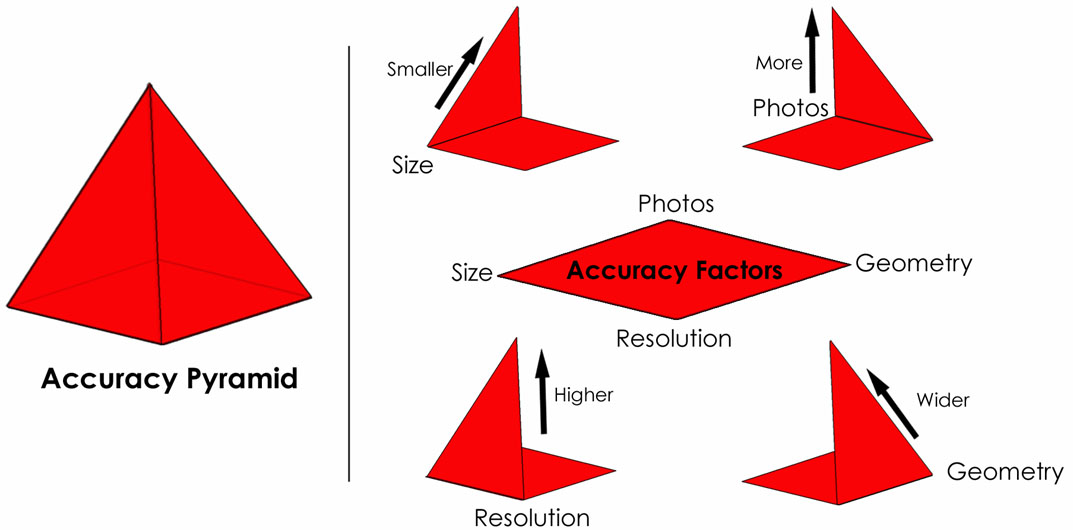
The effects of the four factors
mentioned above on accuracy are illustrated by the diagram below.
The diagram can be thought of as a pyramid with the four factors at
the base of the pyramid and high accuracy at the top of the pyramid.
To get higher accuracy ( a higher pyramid) you need more of the items
shown on the lines of pyramid (higher resolution, smaller size, more
photos, wider (not too wide though) geometry).
How many photographs are
needed for a measurement?
As V-STARS measures by triangulation, in theory only two photographs
are needed, for a measurement. However, we recommend you take a minimum
of four to six photographs. With four to six photographs you can self-calibrate
the camera. Self-calibration is a powerful technique in which the
camera is calibrated as a by-product of the measurement. This allows
the camera to be calibrated at the time of measurement under the conditions
that exist at the time of the measurement. In order to self-calibrate
the camera you must take a minimum of six photographs if the object
is essentially flat, and a minimum of four photographs if the object
isn't flat. Extra photographs also produce a more accurate and reliable
measurement, and typically take little more time to measure so go
ahead and take them. See Triangulation and Self-Calibration for more
information.
How many points are
needed for a measurement?
To get a good solution, we recommend measuring a minimum of twelve
well-distributed points (and preferably fifteen to twenty) in each
photograph. Also, the entire measurement should have at least twenty
(preferably thirty) well-distributed points. When in doubt add more
points. It's quick and easy to do, so go ahead and do it.
Of course, measuring more points
will lead to a better solution, however you quickly reach a point
of diminishing returns. In most cases, measuring more than forty well-distributed
points in each photograph, and more than sixty well distributed points
overall will not significantly improve the solution.
Notice we always qualify the
number of points with the term well distributed. The distribution
of the points can often be much more important than the number of
points. It is better, for example, to have twenty points which are
spread out over the entire area being measured than to have fifty
clustered in one small area and fifty more clustered in another small
area. Points which are added only to improve the distribution of points
are usually called "fill-in" points. See Resection and Self-Calibration
for more details.
Do I need scale for the measurement?
Whether you need scale for the measurement depends on the application,
but most applications do need to scale the measurement. To get scale,
you must provide V-STARS with at least one known distance between
two measured points. You can specify a virtually unlimited number
of scale distances, and we recommend you use at least two scale distances,
whenever possible, to provide redundancy. Of course, the scale points
are like any other points; they must be measured and triangulated.
They do not have to be measured in all the photographs to be triangulated,
and they do not have to be seen in the same photographs. They simply
must be seen in at least two of the entire set of photographs so they
can be triangulated. Of course, for best results, you should try to
see them in at least three or more photographs with good geometry.
Often, to get scale for the
measurement, bars with targets located on them at precisely known
distances are placed on or around the object. This is often not a
trivial matter. Placing the Scale Bars on or near the object without
obscuring other targets or being itself obscured can sometimes be
difficult. One must also be careful to ensure the scale targets fit
onto the photographs since they often are placed around the periphery
of the object, or extend outside the boundaries of the object being
measured. For the best results, the Scale Bar(s) should be comparable
to the size of the object being measured.
Finally, it is very important
to realize the Scale Bar(s) must be rigidly attached to the object
being measured. That is, a Scale Bar CANNOT move relative to the object
being measured while the object is being measured. If it does move
during this time, the scale measurements will be corrupted, and can't
be used. (If the Scale Bar has moved during the measurement, the operator
will be able to detect the movement when looking at the measurement
results).
How do I compensate for scale
changes due to temperature?
If the Scale Bar is made of the same material as the object being
measured, applying the scale distance(s) should scale the entire object
to the temperature at which the Scale Bar was calibrated. If you want
to scale the measurement to another temperature (for example, the
ambient temperature at the time of measurement), you can apply the
temperature coefficient of the Scale Bar material to the calibrated
Scale Bar distance.
If the Scale Bar material is
made of a different material than the measured material, then you
must apply the temperature coefficient of the Scale Bar material to
the calibrated Scale Bar distance to get the true distance at the
ambient temperature. Then, you can scale the measured material to
any temperature by applying the temperature coefficient of the measured
material to the object measurement. However, in both cases, we have
assumed the measured object and the Scale Bar are both at the same
temperature. If the two have significantly different thermal masses,
and the temperature has changed significantly, this assumption will
not hold. Fortunately most measurements are completed so quickly that
there will be very little scale change due to temperature.
Can the object move while
it is being measured?
Yes, under certain circumstances. The object can move during the measurement
as long as it moves as a rigid body. That is, the entire object cannot
undergo any deformation when it is moved. Sometimes, this feature
of V-STARS can be used to simplify a measurement by moving the object
relative to the camera, rather than moving the camera around the object.
For, example if an object is mounted on a turntable, the camera can
remain stationary and the object can be rotated to several positions
with the turntable. Of course, the object must be rigid enough to
maintain its shape when being rotated.
If the object is moved, it is
important that the Scale Bars be mounted so that they move with the
object. If not, the scale measurement is corrupted, and can't be used.
Do I need to use special
targets with the system?
The V-STARS system measures special targets made of a thin 0.125mm
thick (0.005"), flat, grayish colored retro-reflective material.
This material has several advantages over conventional targets (typically
a white circle on a black background). The retro-reflective material
returns light very efficiently to the light source (they are similar
in principle and operation to highway reflectors only much more efficient),
and is typically 100 to 1000 times more efficient at returning light
than a white target. A relatively low-powered strobe located at the
camera lens is used to illuminate the targets, and makes exposure
of the targets independent of the ambient light level. This means
the object can be photographed in bright light or total darkness,
and the target exposure will be the same.
Furthermore, the strobe power
is low enough that the strobe does not normally significantly illuminate
the object. Thus, the target and object exposure are largely independent
with target exposure provided by the strobe, and object exposure provided
by the ambient light. By setting the shutter exposure time appropriately
you can expose the object to whatever level you desire. You can make
a normal exposure, but usually you will want to underexpose the object
significantly to make the target measurement easier and more reliable.
Then, you can use the enhancement features available in V-STARS to
enhance the object.
What size should the targets
be? Can I use different size targets on the same measurement?
The target size depends on the distance from the camera to the
object. A rough rule of thumb is to use a target 2 millimeter (0.040")
in diameter for every meter of object size. For example, you should
use a 6 mm diameter target for a 3 meter object. If necessary, you
can use smaller target sizes by increasing the strobe power. For best
results, we recommend you try to use the same size targets on a measurement
whenever possible. However, target sizes which vary by up to 2 to
1 in size are usually acceptable. See Target Sizes for more information.
How obliquely can I view
the targets?
Although retro-reflective targets have several advantages over conventional
targets (see question above) they tend to lose their special reflective
properties when viewed too obliquely and become dim and unmeasurable.
The targets shouldn't be viewed from more than 60 to 65° off-axis
for the best results. See Target Angle for more details.
Do I need to provide special
lighting for the system? Do I have to consider the lighting during
the measurement?
The strobe system provided with V-STARS is all that is needed to illuminate
the targets, and the target exposure is independent of the ambient
light. However, you should set the shutter time to underexpose the
background. This makes the targets easier to find and measure. See
Background Exposure for information on how to expose the background.
Do I need to know the camera
location when I take a picture? How steady must the camera be when
taking a picture?
You don't have to know where the camera is since V-STARS figures out
where the camera is located automatically using GSI's AutoStart procedure.
With AutoStart, the operator only has to measure four known points
(which can't be collinear) on the image and V-STARS will figure out
where the camera is. If you don't have good coordinates for any points
on the object (a first time measurement, for example) you can use
our AutoBar to get the camera location.
Since the targets are illuminated
by a nearly instantaneous flash from the strobe, the camera doesn't
have to be steady. This is one of the greatest advantages of photogrammetry
over other large-volume, high-accuracy measurement technologies. The
camera can be used on scaffolding, lifts, ladders, etc. and can be
used in environments where movement or vibration is occurring.
How far away do I have to
get from the object to measure it? Where should I locate the camera
to get a good measurement?
The distance from the camera to the object is very easy to determine.
Simply get back far enough to see the object you want to measure (or
the part of the object you want to measure if you are measuring the
object in sections). As a rule of thumb, you will need to get the
same distance back from the object as the size of the object. For
example, you will need to get about ten feet back to measure a ten
foot object. See Field of View for more details.
If you haven't done so already,
read question 1 above about factors affecting accuracy, especially
the fourth factor regarding geometry. Of course, getting good geometry
isn't the only consideration when considering where to locate the
camera for a good measurement. You must also locate the camera so
every target is ultimately seen in at least two (preferably four)
photographs with strong geometry. On objects with lots of blockage
and or complex surfaces, figuring out where to locate the cameras
to get a good measurement can be a challenge.
How can I calibrate the camera and make sure the measurement is accurate?
V-STARS normally automatically calibrates the camera as a byproduct
of the measurement in a process called self-calibration. Self-calibration
is a very powerful technique that allows the camera to be calibrated
at the time of measurement under the conditions that exist at the
time of the measurement. In order to self-calibrate the camera you
must take a minimum of six photographs if the object is essentially
flat, and a minimum of four photographs if the object isn't flat.
If self-calibration can't be used on a particular measurement, pre-calibrated
values can be used but accuracies may be somewhat lower. See Self-Calibration
for more details.
V-STARS also provides internal
estimates of accuracy for each measured point. These internal estimates
of accuracy have been extensively compared to external measures of
accuracy (repeatability, artifacts, known distances, measurements
by other systems, etc.) and have been found to be consistent and reliable.
This is important because often in everyday measurements one does
not have access to external measures of accuracy and must rely on
the internal accuracy estimate as a quality indicator.






